OS: windows 10
Python: 3.10.5 32 bit
g++: clang version 14.0.0 Target: x86_64-w64-windows-gnu
Tomasulo
|__ convert
| |__ input1-converted.txt & other machine code file
| ......
|__ sample
| |__ input1.asm & other asm file
| ......
|__ api.py & other source code
......
由于实现了 gui ,本项目分为两个分支仓库地址,其中 master 分支为无 gui 版本,gui 分支为对应有 gui 的版本
使用前,需要先使用根目录下的converter.py脚本将所需运行的 asm 文件转换成机器码
converter.py 使用示例:
python3 converter.py -file input1.asm默认输出文件名为 ${source file name}-converted.txt 。然后将template.cpp进行编译,并将机器码文件输入即可。
-
gui 分支
template.cpp 仅将 main 函数拆分为了初始化 init 函数和 run_one_tick 单步执行函数,其余几乎未作改动。
gui 分支下,图形界面采用 tkinter 完成。此外,为了直接在 python 中调用 c 程序,采用了 python ctypes 库,并将 template.cpp 中所需用到的函数和定义进行 extern 并用 g++ 进行链接为 dll 方便后续在 python 中直接使用,这一步避免了使用文件流进行通信和复杂的序列化反序列化。具体编译命令如下:
g++ -o .\template.dll -shared -static -m32 -fPIC .\template.cpp注意到这里采用的是**32 bit 的编译命令,所以 python 版本也需要使用32 bit **,否则使用时会提示为不是正确的 win32 文件。
api.py 是利用 ctypes 完成的 python 和 cpp 通信接口,其中类的定义如下例:
class machineState(Structure): _fields_ = [ ("pc", c_int), ("cycles", c_int), ("reservation", resStation*RES_STATION_SIZE), ("reorderBuf", reorderEntry*ROB_SIZE), ("regResult", regResultEntry*REG_SIZE), ("btFuf", btbEntry*BTB_SIZE), ("memory", c_int*MEM_SIZE), ("regFile", c_int*REG_SIZE), ("headRB", c_int), ("tailRB", c_int), ("clear", c_int), ("memorySize", c_int), ("halt", c_int) ]
只需要将需要使用到的类继承 ctypes 中的 Structure 类,并将其各个变量设置为和 cpp 类类型完全一致,即可将 cpp 的执行结果自动解码为 python 类。例如:
template = ctypes.cdll.LoadLibrary("template.dll") # 导入dll c_run_one_tick = template.run_one_tick # 定义单步执行函数 c_run_one_tick.argtypes = [machineState] # 定义函数参数类型 c_run_one_tick.restype = machineState # 定义函数返回值类型
此时 c_run_one_tick 实际上就是一个 python 函数,它接受 machineState 为参数,并调用 cpp 编译的函数执行,再得到同样类型的返回值。
根据上述原理,为了能够让前端自由得到每一个时钟周期的状态机,使用列表存储下所有时刻的状态,并利用列表的 pop 和 append 方法实现前进后退。
api.py 中实现了:获取最新状态 get_present,弹出最新状态(后退一步)states_pop,获取列表长度 states_len,初始化 init_states,单步执行 run_one_tick 五个简单操作。
gui.py 主要利用 Tkinter 库完成,其中画表部分采用 Treeview 控件,只需要每次获取状态机并将其中的内容填表即可,较为简单。
启动命令:python gui.py
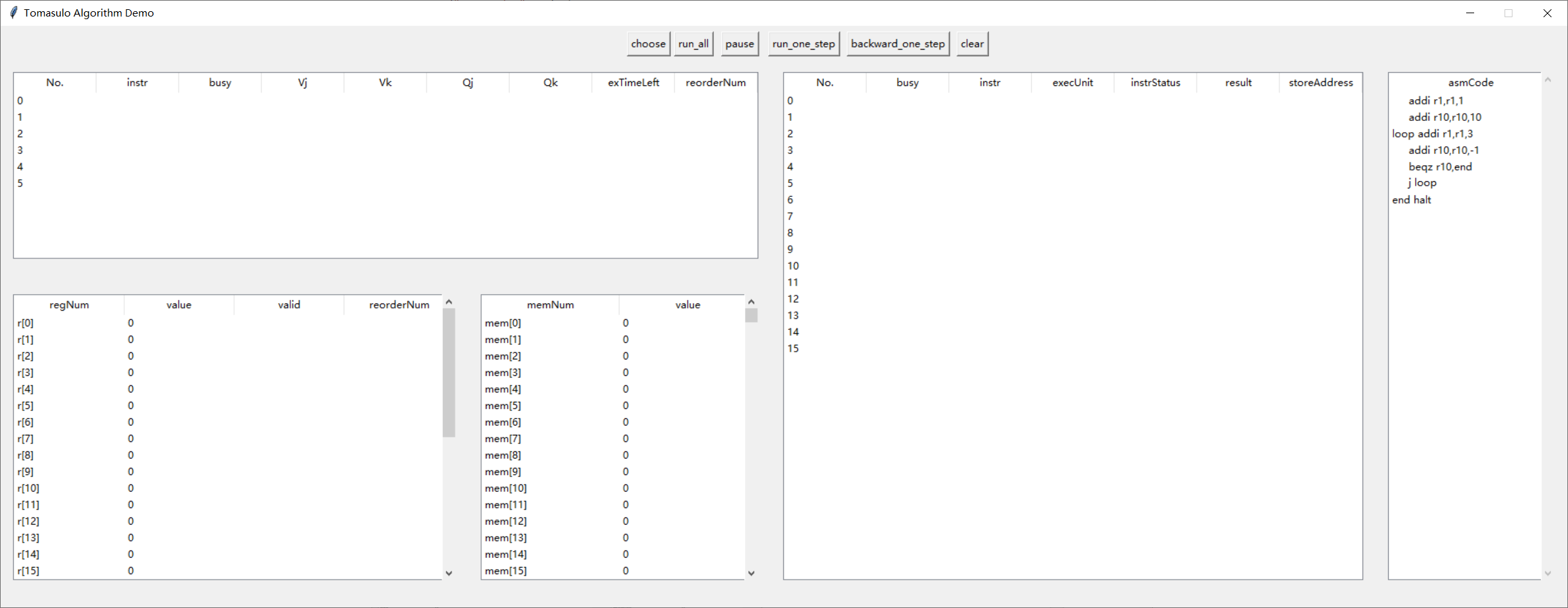
图形界面如上图所示,具体操作流程是,choose 按钮选择 asm 文件读入,此时右侧 asmCode 表格会将汇编代码打印出来:
run_all 按钮会让程序从当前状态一直运行到停止为止,pause 按钮则可以让这个过程停止。run_one_step 可以让当前状态运行一个周期,backward 按钮可 以让当前状态回滚一个周期(请勿在 run_all 的过程中运行 run_one_step 或 backward,可能导致状态机出现问题,尽量在暂停状态下使用),clear 则让 g ui 程序恢复初始状态(也请在程序运行结束或暂停的清况下清空)
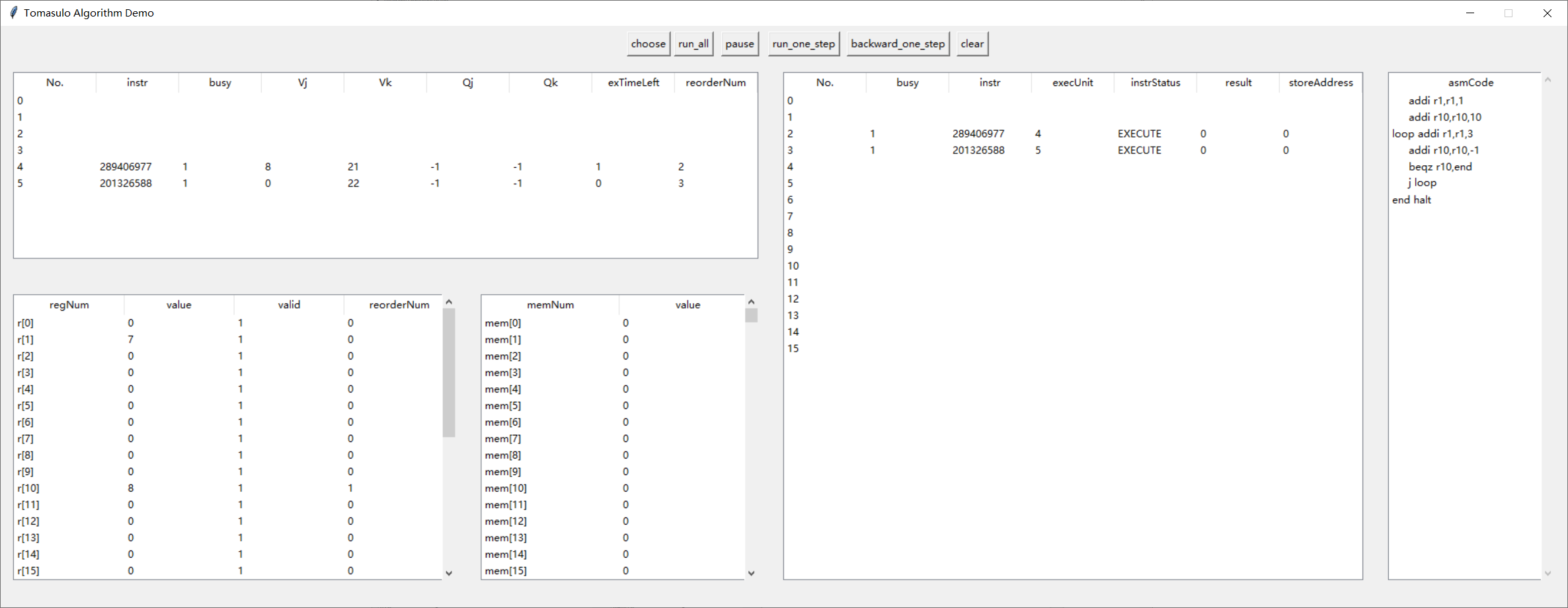
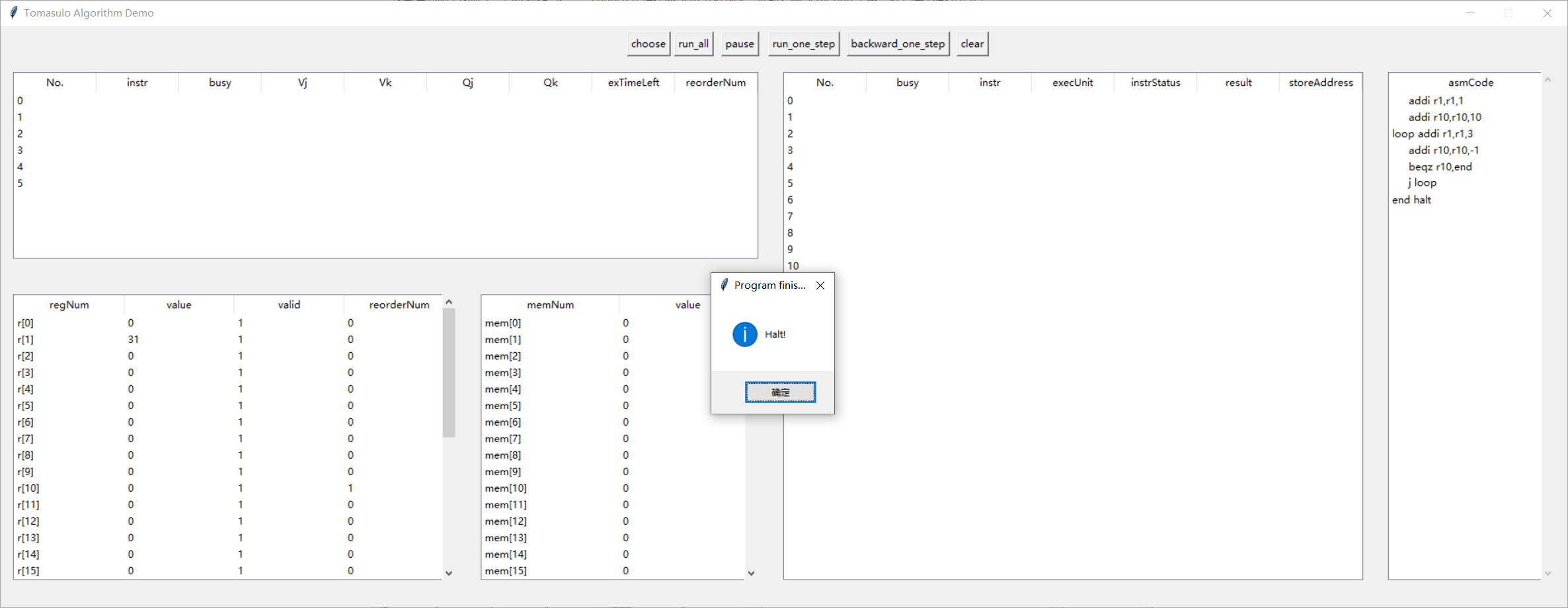
运行中的程序如下,各个部分的表格将会实时刷新。当任务完成后,将会提示停机:
-
converter
实现思路是,首先利用 split 函数将注释和多余空格去掉,然后将头部不属于操作符的标号的行号和对应名称计入字典,再次遍历时,如果尾部有字典中的标号,就计算出偏移值。然后进行按位与操作即可输出整数格式的机器码
-
虚拟机
-
指令各个域解码:该部分只需要对指令进行位移和按位与操作即可,例如:
int field2(int instruction) { /* *[TODO] *返回指令的第三个寄存器,Rd */ int reg3 = (instruction >> 11) & 0x1f; return reg3; }
-
保留栈更新:根据代码,Qj/Qk 表示某一保留栈项所等待的保留栈项标号。只需要遍历所有保留栈,并将 Qj/Qk 满足的项的 Vj/Vk 置为所对应的值即可。
void updateRes(int unit, machineState *statePtr, int value) { /* *[TODO] * 更新保留栈: * 将位于公共数据总线上的数据 * 复制到正在等待它的其他保留栈中去 */ for (int i = 0; i < NUMUNITS; i++) { if (statePtr->reservation[i].Qj == unit) { statePtr->reservation[i].Vj = value; statePtr->reservation[i].Qj = -1; } if (statePtr->reservation[i].Qk == unit) { statePtr->reservation[i].Vk = value; statePtr->reservation[i].Qk = -1; } } }
-
发射指令:将对应得 ROB 项和保留栈项的相关项的各个域按照注释所述填写正确即可。
-
检查 ROB 空闲:考虑到本实验的计算延迟最多不超过3,功能部件最多不超过2个,所以只需检查 tailRB - headRB 是否等于 ROB 大小即可
-
计算结果:按照不同的指令计算即可。注意要根据位数进行转换
else if (op == LW) { return statePtr->memory[rStation.Vj + convertNum16(immed)]; }
-
主循环(单个时钟周期):
- COMMITTING:分两种情况考虑:跳转 or 非跳转。若需要跳转,则需要清空 ROB 和保留栈,并将头尾指针归零,寄存器恢复valid;若非跳转,则根据指令的不同,对寄存器或内存进行操作。此处多了一个 updateRes,是因为如果在 Writing Result阶段紧接着 Issue 了一条指令,新发射的指令并不会采用写回的结果(实验框架决定),所以必须要再一次进行保留站更新从而杜绝这种问题
- 其余状态:
- ISSUE:若两个寄存器均准备好(没有冲突),进入 EXECUTING 阶段
- EXECUTING:减少剩余时间,如果时间等于0,调用计算结果函数获取计算结果并写入 ROB 对应项的 result 域
- WRITING RESULT:将所有依赖结果的保留栈通过调用保留栈更新函数进行更新结果,并将对应使用结束的保留栈置为空闲,然后转入COMMITING 状态
- 发射新指令:同时检查 ROB 和保留栈相关计算单元是否空闲,均空闲则发射新指令,并将 pc + 1。需要注意全0的指令在本实验框架中也作为合法指令,所以需要限定 pc 不超过 memorySize,否则会发射 add r0,r0,0 这样的指令
- 周期数 + 1
图形界面 tkinter 以及 ctypes 的选用与聂鼎宜、卢鹏交流得出,在此之外并未有代码的抄袭。图形界面的鲁棒性不高,并未对 button 等控件的 enable 状态进行限制,在各种反复点击和非法操作下可能会出错,敬请谅解。
-